
Today, with the rapid development of soft robotics and biomedical engineering, how to manufacture solid silicone models that feature both complex geometries and high density has long been a major challenge for the industry.
On January 16, 2026, the Department of Mechanical Engineering at The Chinese University of Hong Kong, in collaboration with The University of Manchester, the Chinese Academy of Sciences, and Nottingham Trent University, proposed a breakthrough solution — a robot-assisted multi-axis embedded silicone printing system (Multi-axis Embedded Silicone Printing, ESP).
By introducing an innovative curved-surface slicing algorithm and interlaced path-planning strategy, the research successfully eliminated the staircase effect commonly found in conventional 3D printing. As a result, the infill density of soft silicone models was increased to 99.47%, significantly advancing the development of personalized medical assistive devices and high-performance soft robots.
Research Background
Silicone materials are widely used in artificial tissues, wearable devices, and soft robots due to their excellent heat resistance, electrical insulation, and high biocompatibility with human tissues. However, manufacturing solid silicone structures with complex geometries remains a significant challenge.
Traditional mold casting techniques are well established, but when dealing with complex topologies or undercut features, they often require expensive and complicated multi-part molds, making the process costly and unsuitable for personalized customization.
To address this issue, direct ink writing (DIW) 3D printing was introduced. However, when printing low-viscosity silicone, the material tends to collapse under gravity. This limitation led to the development of embedded printing (ESP), where the silicone is printed inside a gel-like support matrix. While ESP effectively prevents collapse, it introduces new challenges when producing solid volumetric models.
Current ESP techniques mainly rely on traditional three-axis printers and planar slicing strategies. This layer-by-layer stacking method inevitably produces a staircase effect when fabricating curved surfaces, resulting in poor surface quality. More critically, because the silicone ink and support matrix are immiscible, printing large solid volumes often causes material accumulation or internal voids between layers, which significantly weakens the mechanical performance of the final structure.
Therefore, overcoming the limitations of planar printing and achieving high-fidelity, high-density soft-material fabrication has become a key challenge in this field.
Research Approach: A “Multi-Dimensional” Breakthrough Integrating Hardware and Software
To address these challenges, the research team from The Chinese University of Hong Kong abandoned the traditional planar fabrication paradigm and developed a robot-assisted multi-axis printing framework that tightly integrates hardware and computational manufacturing algorithms.
The core innovation lies in leveraging the flexibility of a six-degree-of-freedom robotic arm, combined with advanced computational manufacturing algorithms, enabling a shift from “2D layer stacking” to “3D conformal fabrication.”
This approach represents a fundamental transformation in additive manufacturing of soft materials, allowing complex silicone structures to be produced with higher surface quality, greater density, and improved mechanical performance.
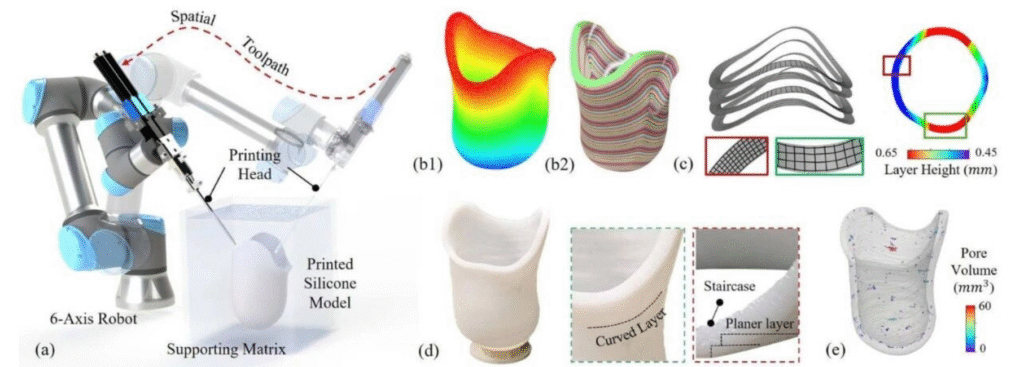
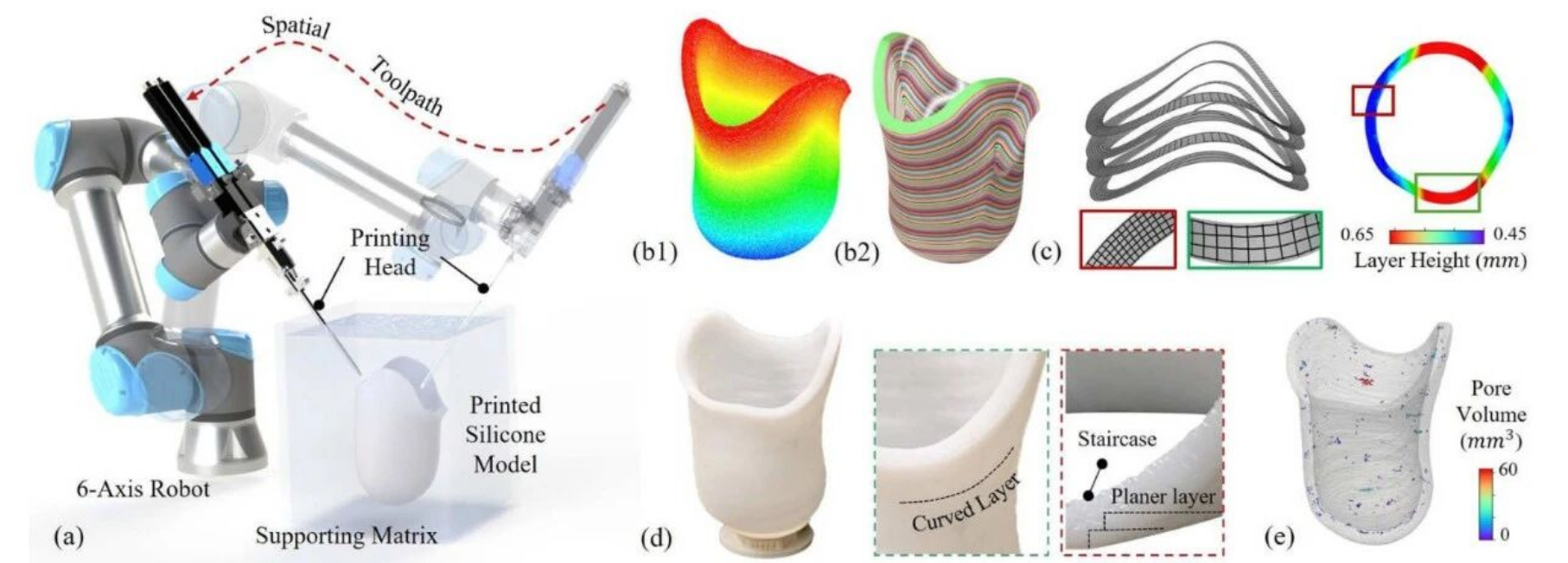
△ (a) The proposed multi-axis embedded silicone printing (ESP) system fabricates free-form volumetric silicone models by robot-assisted spatial material deposition within a gel-like support matrix.
(b) The workflow for spatial path generation includes field-based slicing optimized for uniform layer height.
(c) A boundary-conforming path planning strategy with interleaved deposition within each layer is adopted. Path density is controlled through extrusion constraints related to the local layer height.
(d) Compared with conventional planar slicing approaches, the proposed multi-axis ESP significantly reduces the staircase effect, improving surface finish and geometric fidelity.
(e) Manufacturing results for a custom prosthetic socket demonstrate nearly solid filling, with CT scanning revealing a filling rate of 99.47%.